back
SimHub slip
Minimizing time around circuits wants maximizing lateral accelerations.
In real life, kinesthesia helps drivers accomplish that.
Motion rigs, harness tensioning and haptics can help in sim racing.
Lateral grip is optimized by managing tire slip:
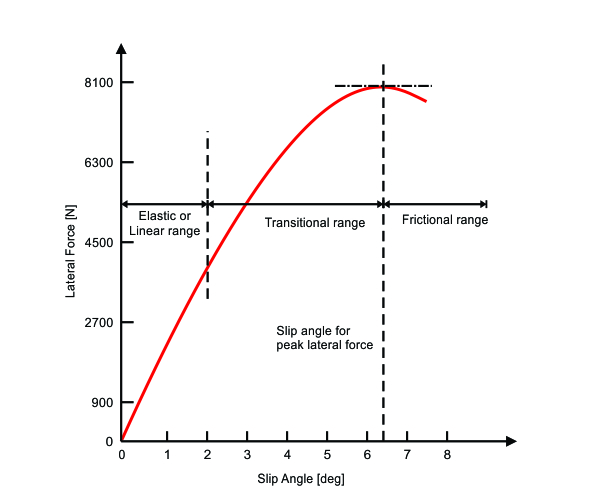
About 6 degrees of slip angle maximizes lateral grip
Oversteer and understeer are front to rear slip angle differences.
Assetto Corsa is unusual in providing slip properties:
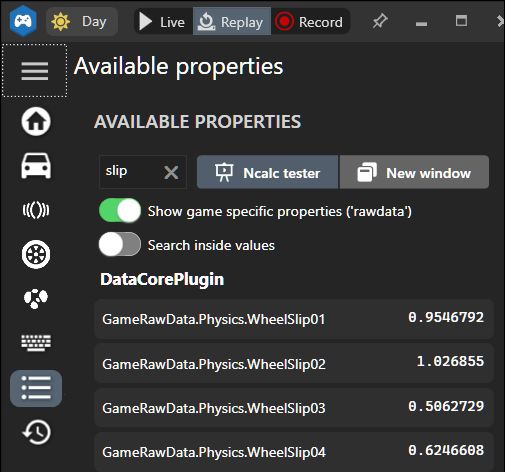
These presumably include both lateral and logitudinal slip.
- front:
steering_angle - (a * yaw_velocity + lateral_velocity) / longitudinal_velocity
- rear:
(b * yaw_velocity + lateral_velocity) / longitudinal_velocity
- .. where
a and b are vehicle-specific center-of-gravity location constants
Lacking those vehicle-specific constants for any cars in various sims,
make a simplifying assumption:
- for low lateral accelerations, slip angles should be nearly zero:
(b * yaw_velocity + lateral_velocity) = 0
b = - lateral_velocity / yaw_velocity
a = (steering_angle * longitudinal_velocity - lateral_velocity) / yaw_velocity
Division by yaw_velocity will be problematic near zero.
OxyScope data plots show problematic ratios
for steering angles smaller than 1/4 degree
- Collect
a and b estimation data for steering_angle > 0.25
and slip angles < 2, staying within low noise linear slip angle region.
- Since
slip angles depend on as yet unknown a and b,
instead limit based on steering_angle < 2 and low lateral accelerations.
Next step: understanding relevant SimHub properties
relevant SimHub properties
- AccelerationHeave, AccelerationSurge, AccelerationSway,
GlobalAccelerationG, OrientationPitchAcceleration,
OrientationRollAcceleration, OrientationYawAcceleration,
OrientationYawVelocity, SpeedKmh
- GlobalAccelerationG is just negative AccelerationSurge
motion formulae
SlipAngleLf = (LateralVelocity + YawVelocity * Df) / (SpeedKmh - YawVelocity * Axf/2) - SteeringAngleL
SlipAngleRf = (LateralVelocity + YawVelocity * Df) / (SpeedKmh + YawVelocity * Axf/2) - SteeringAngleR
SlipAngleLr = (LateralVelocity - YawVelocity * Dr) / (SpeedKmh - YawVelocity * Axr/2)
SlipAngleRr = (LateralVelocity - YawVelocity * Dr) / (SpeedKmh + YawVelocity * Axr/2)
...where:
Df and Dr are distances from center of gravity to front and rear axles, respectively
Axf and Axr are front and rear axle lengths, respectively
- note sign changes front-to-rear (
Df vs Dr) and left-to-right (Axf or Axr)
Approximations
- Tire slip angles less than 6 degrees are most useful.
don't bother applying tan or arctan for angles < 6 degrees
AKA small angle approximation
- calculating slip angles for all 4 tires is wasteful;
slip angles mostly matter when large on heavily loaded side.
|